软材料在使用中常会面临尖锐物体穿刺的风险——软体机器人在复杂环境中作业时可能被异物刺穿,生物医学植入物也可能在使用过程中遭受穿刺损伤。一旦发生穿刺失效,轻则导致设备功能丧失,重则可能引发安全事故。因此,深入理解软材料在复杂三维应力作用下的破坏机理,并开发具备实时穿刺应力监测能力的材料体系,具有重要的科学意义与应用价值。
离子凝胶是一类由聚合物网络与离子液体构成的软材料,在软体机器人、光电子器件等前沿领域正展现出广阔的应用前景。相较于离子凝胶受压缩或拉伸后的损伤研究,针对穿刺这类复杂且伴随大形变的三维失效过程的研究仍十分有限。其难点在于:(1)穿刺失效过程涉及快速且非均匀的三维变形,给实时空间表征带来较大难度;(2)作为包含多组分及多种相互作用的复合体系,离子凝胶在采用常规技术研究时,往往难以捕捉应力诱导的结构演变及其在分子水平上的结构–性能关系。因此,现有工作大多停留在定性观察层面,且分析方法过度依赖有限元数值模拟,缺乏直接的实验数据支撑,限制了对离子凝胶材料穿刺破坏机理的深入理解。
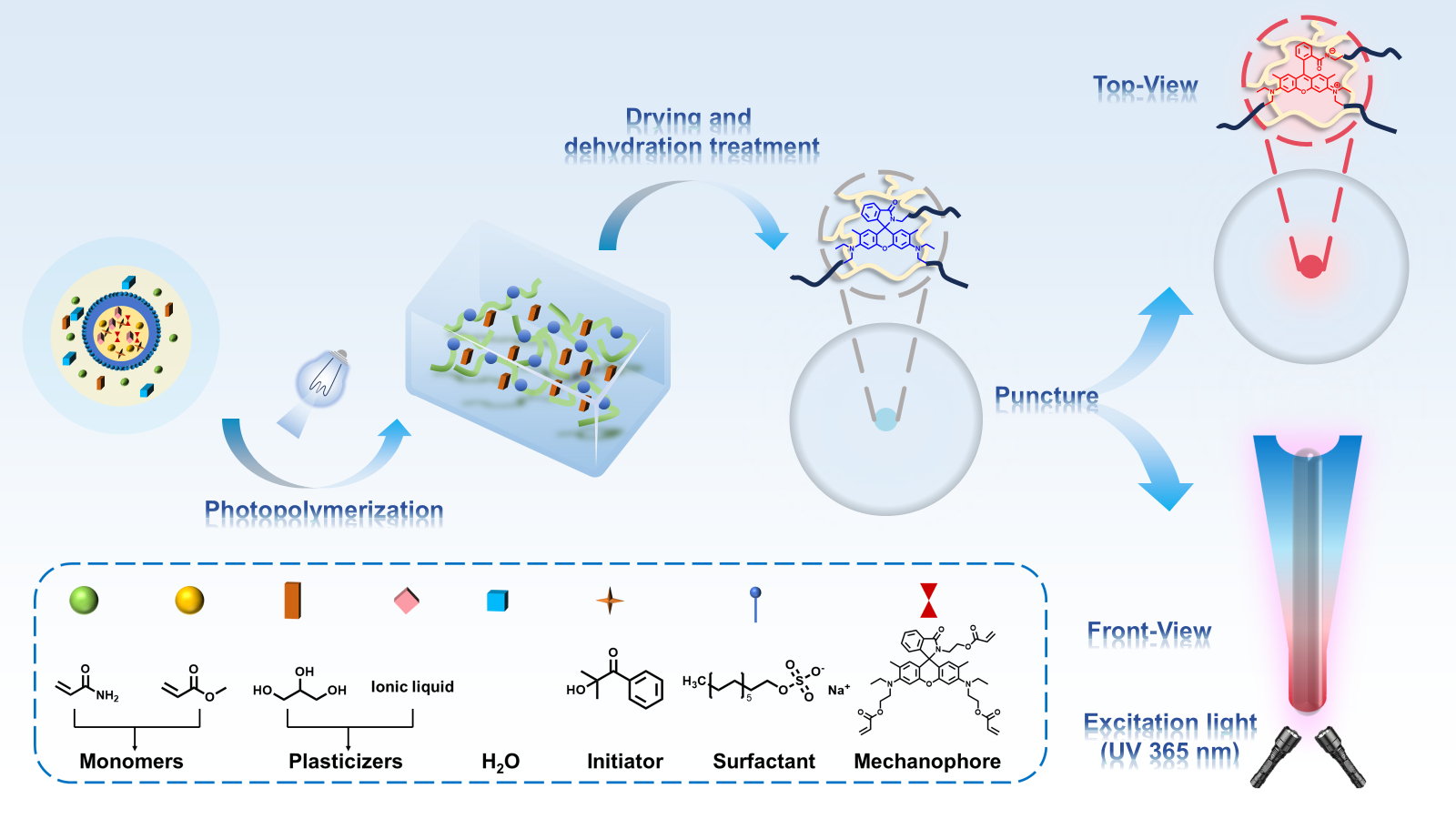
图1.抗穿刺离子液体凝胶的制备过程与穿刺应力实时可视化示意图
为此,陈于蓝教授团队开发了一类兼具优异力学性能与实时应力可视化能力的力致变色荧光离子凝胶。通过在体系中引入罗丹明力敏团作为应力探针,实现了穿刺过程中应力分布的直接可视化。系统研究了压头几何形状(椭球形、半球形、平底形)、直径、穿刺速率及界面摩擦等因素对穿刺行为的影响。结果表明,不同压头几何形状通过改变其接触模式主导穿刺行为:椭球形压头仅以尖端底部接触薄膜,产生显著的应力集中,因而诱导出最明显的荧光变色响应;平底形压头则因压杆侧壁与薄膜发生接触,部分穿刺力被耗散,力致变色敏感性最弱。同时,薄膜与压头间的界面摩擦力是调控裂纹扩展模式的关键因素——高摩擦力抑制界面相对滑移,致使裂纹从非接触区域萌生并扩展至整体断裂;低摩擦力则引发压头尖端滑移,使变形主要集中于接触区域,进而导致该部位优先发生穿刺变色。
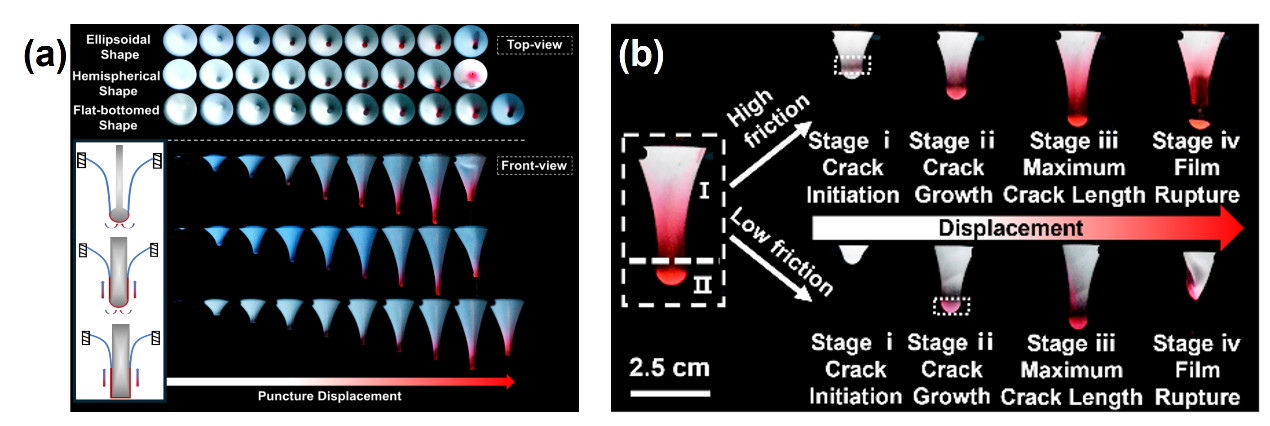
图2.穿刺过程中离子凝胶的荧光变化:(a)不同压头形状;(b)不同界面摩擦的影响
该研究充分利用罗丹明力敏团在穿刺过程中表现出的力致变色与荧光响应特性,建立了穿刺应力与荧光颜色变化之间的定量映射关系。结合实时荧光成像方法,实现了穿刺过程应力场的原位可视化与图谱构建。该平台通过将荧光信号转换为应力分布图,使得薄膜各区域在穿刺过程中的应力演变得以直观呈现,为深入理解具有大形变及高度非均匀变形特征的软材料及其微观失效机制提供了新的研究方法。
该研究成果以“Mechanochromic Fluorescent Ionogels for Puncture-Resistant Soft Materials with Real-Time Stress Mapping”为题发表在Angewandte Chemie International Edition上(Angewandte Chemie International Edition,2026: e4244119)。91视频-性视频-国产视频
博士研究生王奇为第一作者,91视频-性视频-国产视频
陈于蓝教授为通讯作者。
论文链接://doi.org/10.1002/anie.4244119


 当前位置:
当前位置:

